Асинхронный двигатель
Содержание
Устройство
По определению «асинхронным» называют двигатель переменного тока, у которого ротор вращается медленнее чем магнитное поле статора, то есть несинхронно. Но это определение не слишком информативно. Чтобы его понять нужно разобраться как устроен этот двигатель.
Асинхронный двигатель, как и любой другой состоит из двух основных частей — ротор и статор. «Для чайников» в электрике расшифруем:
- Статором называют неподвижную часть любого генератора или электродвигателя.
- Ротором называют вращающуюся часть двигателя, которая и приводит в движение механизмы.

Статор состоит из корпуса, торцы которого закрываются подшипниковыми щитами, в которых установлены подшипники. В зависимости от назначения и мощности двигателя используют подшипники скольжения или качения. В корпусе расположен сердечник, на нём установлена обмотка. Её называют обмоткой статора.

Так как ток переменный, чтобы снизить потери из-за блуждающих токов (токи Фуко) сердечник статора набирают из тонких стальных пластин, изолированных друг от друга окалиной и скрепленных лаком. На обмотки статора подают питающее напряжение, ток протекающий в них называют током статора.
Количество обмоток зависит от числа питающих фаз и конструкции двигателя. Так у трёхфазного двигателя минимум три обмотки, соединённых по схеме звезды или треугольника. Их количество может быть больше, и оно влияет на скорость вращения вала, но об этом мы поговорим далее.
А вот с ротором дела обстоят интереснее, как уже было сказано он может быть или короткозамкнутым, или фазным.

Короткозамкнутый ротор – это набор металлических стержней (обычно алюминиевых или медных), на рисунке выше обозначены цифрой 2, впаянных или залитых в сердечник (1) замкнутых между собой кольцами (3). Такая конструкция напоминает колесо, в котором бегают одомашненные грызуны, отчего её часто называют «беличьей клеткой» или «беличьим колесом» и такое название не жаргонное, а вполне литературное. Для уменьшения высших гармоник ЭДС и пульсации магнитного поля, стержни укладывают не вдоль вала, а под определенным углом относительно оси вращения.
Фазный ротор отличается от предыдущего тем, что на нем уже есть три обмотки, как на статоре. Начала обмоток подключаются к кольцам, обычно медным, они напрессованы на вал двигателя. Позже мы кратко объясним зачем они нужны.

В обоих случаях, один из концов вала соединяют с приводимым в движение механизмом, он выполняется конической или цилиндрической формы с проточками или без, для установки фланца, шкива и других механических приводных деталей.
На «задней» части вала закрепляют крыльчатку, которая необходима для обдува и охлаждения, поверх крыльчатки на корпус надевается кожух. Таким образом холодный воздух направляется вдоль ребер асинхронного двигателя, если эта крыльчатка по какой-то причине не будет вращаться — он перегреется.

Конструкция первого асинхронного двигателя была разработана М.О. Доливо-Добровольским и запатентовал он её в 1889 г. Без особых изменений дожила до настоящего времени.
Разные типы двигателя
 В отличие от трёхфазного, однофазный асинхронный двигатель часто применяется в бытовой технике – пылесосах, стиральных машинах, вентиляторах, кухонных комбайнах, блендерах и т.д. Они же применяются в магнитофонах и проигрывателях виниловых дисков. Даже в составе персонального компьютера можно найти не один асинхронный двигатель. Но к устройству этой версии двигателя мы вернёмся чуть позже.
В отличие от трёхфазного, однофазный асинхронный двигатель часто применяется в бытовой технике – пылесосах, стиральных машинах, вентиляторах, кухонных комбайнах, блендерах и т.д. Они же применяются в магнитофонах и проигрывателях виниловых дисков. Даже в составе персонального компьютера можно найти не один асинхронный двигатель. Но к устройству этой версии двигателя мы вернёмся чуть позже.
Первым появился на свет именно трёхфазный электродвигатель, принцип работы которого строился на взаимодействии электромагнитных полей. Основные части асинхронного двигателя – это статор и ротор. Соответственно, статором была названа часть, которая остаётся неподвижной. Именно она находится непосредственно под внешней оболочкой устройства и имеет форму цилиндра. В этой части по кругу расположены три обмотки – под углом 120° друг к другу.
В современных двигателях можно насчитать множество обмоток, однако, они соединены друг с другом так, чтобы каждая последующая отличалась от предыдущей по фазе, и фазовый сдвиг между соседними обмотками составлял 120°. Обмотки наматываются медным проводом, и к каждой из групп подключается напряжение со своей фазы. Таким образом, получается, что магнитное поле движется по этим обмоткам, как бы замыкаясь в кольцо.
Статор тоже имеет свои обмотки. Так как на статор электричество не подаётся, он имеет право на замкнутый проводник, который иногда вместо обмоток формируют в виде так называемой беличьей клетки. Если сравнивать точнее, то эта деталь напоминает не саму клетку для проворного грызуна, а беличье колесо, предназначенное для того, чтобы животное выплёскивало свою неуёмную энергию. В роторе устройства «беличья клетка» формируется путём заливки расплавленного алюминия в пазы сердечника, выполненного из набранных стальных листов. Такое устройство называется короткозамкнутым ротором.
Если статор выполнен с реальными обмотками, то он обычно делается многополюсным. Такой ротор называют фазным. Обмотки этого ротора замыкают звездой или треугольником.
Ротор имеет собственный вал, который опирается на задний и передний подшипники. Они, в свою очередь, закреплены на корпусе двигателя так, что ротор внутри статора может свободно вращаться. Принцип действия асинхронных двигателей основан на том, что в обмотках или «беличьем колесе» статором наводится магнитное поле. Под его действием в проводниках ротора появляется ток, а с ним – собственное магнитное поле.
Переменное магнитное поле статора увлекает за собой ротор, и тот начинает вращаться. Но магнитное поле ротора всегда запаздывает относительно поля статора, и вращение обоих полей не может происходить синхронно. Это заставляет ротор преодолевать множество действующих на него сил:
- силу тяготения;
- трение качения (если используется шариковый или роликовый подшипник);
- трение скольжения (если в качестве подшипника применяется бронзовая втулка);
- силу противодействия приводимого в движение оборудования.
Последняя сила зависит от многих моментов, поэтому её невозможно свести к какому-либо простейшему физическому параметру. Если надо сдвинуть с места трамвай, то двигателю приходится на себя брать нагрузку от редуктора, который надо раскрутить, от самого вагона, который надо сдвинуть, к тому же не надо забывать ещё и о силе трения качения, которое испытывают колёса транспортного средства.
В случае когда идет описание работы профессиональной мясорубки, которую приводит в действие асинхронный двигатель, то здесь преодолевается сопротивление и самого редуктора, и того куска мяса или даже кости, которую надо перемолоть.
Поскольку между статором и ротором есть зазор, то ротор под нагрузкой просто отстаёт от статора по угловой скорости. Следовательно, частота вращения ротора зависит от нагрузки на вал двигателя. Нарушается принцип синхронности, оттуда и название самого устройства: «асинхронный двигатель».
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов – обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Назначение асинхронного двигателя
Введение
Трёхфазный двигатель — электродвигатель, который конструктивно предназначен для питания от трехфазной сети переменного тока.
Представляет собой машину переменного тока, состоящую из статора с тремя обмотками, магнитные поля которых сдвинуты в пространстве на 120° и при подаче трехфазного напряжения образуют вращающееся магнитное поле в магнитной цепи машины, и из ротора — различной конструкции — вращающегося строго со скоростью поля статора (Синхронный двигатель) или несколько медленнее его.
Наибольшее распространение в технике и промышленности получил асинхронный трёхфазный электродвигатель с короткозамкнутой обмоткой ротора, также называемой «беличье колесо». Под выражением «трехфазный двигатель» обычно подразумевается именно этот тип двигателя, и именно он описывается далее в статье.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |
Асинхронный трёхфазный электродвигатель.
Расчет трехфазного асинхронного электродвигателя.
Исходные данные: Iпуск/Iном = 6,5; Ммакс/Мно = 2,0; КПДном = 0,82; сosjном = 0,83; Тип двигателя—4А80А2У3; Рном=1,5 кВТ; Sном=7,0 %.
Решение
Определим номинальный ток двигателя:
По найденному значению тока из табл. Приложения 2 выбираем сечение питающего провода для двигателя. При номинальном токе 3,35 А подойдут провода сечением 2,5 кв. мм трехжильные медные с резиновой или полихлорвиниловой изоляцией или трехжильные алюминиевые провода с резиновой или полихлорвиниловой изоляцией.
Определим величину пускового тока из известного по условию задачи соотношения Iпуск/Iном = 6,5:
Определим номинальный ток плавкой вставки:
Если принять, что двигатель работает с тяжелыми условиями пуска (большая длительность разгона, частые пуски):
Из ряда стандартных плавких вставок на номинальные токи 6, 10, 15, 20, 25, 30, 50, 60, 80, 100, 120, 150 А выбираем вставку на номинальный ток 15 А.
Определим частоту вращения магнитного поля двигателя:
В обозначении двигателя (4А80А2У3) после буквы «А» указано количество полюсов, количество пар полюсов вдвое меньше, т.е. в данном случае Р = 1.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |
Определим частоту вращения ротора двигателя:
Определим вращающий момент при номинальном режиме работы:
Из заданной по условию задачи перегрузочной способности двигателя (Ммакс/Мно = 2,0) определим максимальный вращающий момент:
Определим величину скольжения, при которой момент наибольший:
Из двух полученных значений по условию устойчивой работы двигателя выбираем .
Определим пусковой момент двигателя (при S = 1):
Определим момент при S = 0,2:
Момент при S = 0,4:
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |
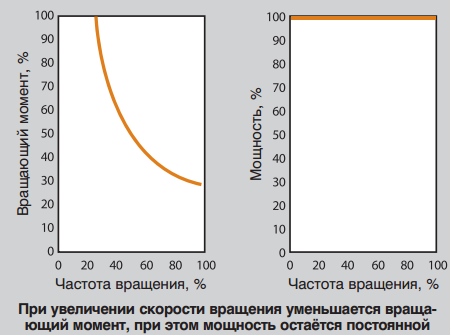
Построим график зависимости вращающего момента от скольжения:
Трёхфазный двигатель — электродвигатель, который конструктивно предназначен для питания от трехфазной сети переменного тока.
Представляет собой машину переменного тока, состоящую из статора с тремя обмотками, магнитные поля которых сдвинуты в пространстве на 120° и при подаче трехфазного напряжения образуют вращающееся магнитное поле в магнитной цепи машины, и из ротора — различной конструкции — вращающегося строго со скоростью поля статора (Синхронный двигатель) или несколько медленнее его.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |
Назначение асинхронного двигателя
Система трехфазного переменного тока, позволившая создать устройства для получения вращающегося магнитного потока, вызвала появление наиболее распространенного в данное время электродвигателя, называемого асинхронным. Это название обусловлено тем, что вращающаяся часть машины — ротор — всегда вращается со скоростью, не равной скорости магнитного потока, т.е. не синхронно с ним. Изготовляемый на мощности от долей ватта до тысяч киловатт при напряжениях 127, 220, 380, 500, 600, 3000, 6000, 10000 В, этот электродвигатель прост по конструкции, надежен в эксплуатации и дешев по сравнению с другими типами. Он применяется во всех видах работ, где не требуется поддержания постоянной скорости вращения, а также в быту, в однофазном исполнении для малой мощности.
Источник
Как сделать своими руками?
Для начала стоит уточнить, что с нуля создать асинхронную мобильную станцию не получится. Максимум, что можно сделать, – это изготовить ротор без переделки или модернизировать двигатель асинхронного типа в альтернативную конструкцию.
Для проведения работ по модернизации ротора достаточно запастись готовым статором от мотора и провести ряд экспериментов. Главная идея сборки самодельного генератора заключается в использовании неодимовых магнитов. С их помощью удастся обеспечить ротор необходимым количеством полюсов для выработки электрической энергии.

Посредством наклеивания магнитов на заготовку, которую предварительно необходимо посадить на вал, и соблюдения полярности и угла сдвига получится добиться нужного результата. Магнитов потребуется много, минимальное количество составляет 128 штук. Готовая конструкция ротора подгоняется к статору. При выполнении этой процедуры необходимо предусмотреть зазор между зубцами и магнитными полюсами ротора. Он должен быть минимальным.

В процессе важно регулярно охлаждать конструкцию, чтобы предотвратить появление деформаций и утерю магнитных свойств. Если все сделано правильно, то генератор будет работать исправно
В процессе создания асинхронного генератора может возникнуть только одна проблема. В домашних условиях трудно изготовить идеальную конструкцию ротора, поэтому если есть возможность воспользоваться токарным станком, то лучше ею не пренебрегать. Кроме того, на подгонку деталей и их доработку потребуется много времени.
Еще один вариант, с помощью которого можно получить генератор, – это преобразование асинхронного двигателя, используемого в автомобилях. Дополнительно следует приобрести электромагнит, мощность которого будет соответствовать требованиям по отношению к будущему оборудованию. Стоит отметить, что при поиске двигателя нужно учитывать, чтобы его мощность была на половину выше показателя, которого хочется добиться в генераторе.

Чтобы получить нужную конструкцию и организовать ее эффективную работу, потребуется приобрести 3 модели конденсаторов. Каждый элемент должен быть способен выдержать напряжение в 600 и более В.
Реактивная мощность генератора асинхронного типа имеет связь с емкостью конденсатора, поэтому вычислить ее можно по формуле. Стоит отметить, что при повышении нагрузки мощность генератора растет. Таким образом, чтобы добиться стабильного напряжения в сети, потребуется увеличить емкость конденсаторов.

Про принцип работы асинхронного генератора смотрите в следующем видео.
Принцип работы устройства
 Частями асинхронного двигателя являются статор и ротор.
Частями асинхронного двигателя являются статор и ротор.
Если начать подавать электрический ток на кабели статора, то двигатель начнет работать. Внутри машины начинается индукция, то есть в двигателе индуцируется мощное электромагнитное поле. Например, в технике с постоянным электрическим током необходимо создавать электромагнитное поле в якоре с помощью щеток.
По закону Фарадея, в устройстве, которое обладает короткозамкнутой обмоткой, проходит наведенный электроток, потому что цепочка замыкается по методу короткого замыкания. Данный ток, как и напряжение в статоре, приводит к появлению магнитного поля. Ротор устройства становится магнитом в статоре, обладающим вращающимся электромагнитным полем.
Статор не двигается, и поле перемещается внутри машины с нормальной скоростью, а в роторе индуцируется электроток, что делает из него мощный магнит. Благодаря этому подвижный ротор начинает двигаться благодаря полю статора. Почему происходит асинхронное вращение, можно понять, зная, что в момент объединения магнитные поля пытаются компенсировать недостатки друг друга.
Процесс скольжения может проходить не только с небольшим опозданием, но и с опережением. В первом случае мотор превращает электроэнергию в механическую (например, станок начинает двигаться). А во втором происходит генераторная работа, то есть движение деталей устройства вырабатывает электричество.
Принцип работы
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
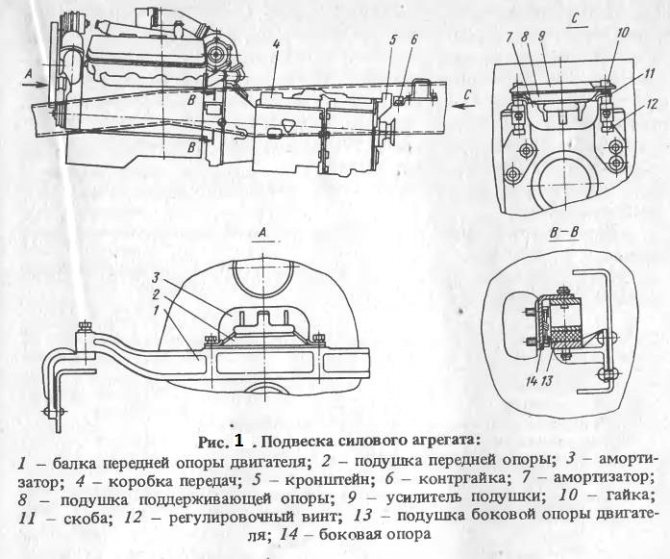
Строение асинхронного двигателя
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.

- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.

Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
//www.youtube.com/embed/hu9TaxRe2UE?feature=player_detailpage
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет.
Формула, из которой следует, что электрические машины переменного тока двухфазного или однофазного типа должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателя
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. 17. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая сила (э.д.с.). В замкнутых витках диска появляется ток, а вокруг проводников с
током — магнитное поле, которое взаимодействует с магнитным полем магнита и приводит диск во вращение.
Обозначим:
n1— частота вращения магнита (синхронная частота), об/мин;
n2— частота вращения диска, об/мин;
n — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вра-

Рис. 17. Модель асинхронного двигателя
щается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:

В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети U1 в его обмотке протекает ток I1. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. E1 и E2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком.
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. E2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 18. Предположим, что он совпадает по фазе с E2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образом, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2cosφ в механическую.

Рис. 18. Работа асинхронного двигателя при cosφ2 = 1
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. E2, а следовательно, ток I2 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз АВС на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой n2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой n1. Частота вращения ротора

Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска n2 = 0; а если вообразить, что ротор вращается синхронно с потоком, n2 = n2.
Чем больше нагрузка на валу, тем меньше скорость ротора n2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении E2 и I2, а значит и S. Скольжение при номинальной нагрузке Sн у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в “звезду”, а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Основные отличия

Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.
Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.